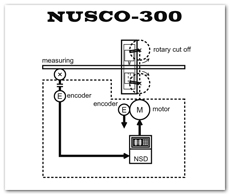
NUSCO-300
This is servo control for rotary machine for cutting or other tooling a running strip of material on its fl y by cutting knife or other tool which rotates. The controller makes a numerical command to the rotary machine, compares the command to numerical feed-back information from rotary machine and measuring roll. When a target position approaches, the cutting knife or other tool accelerates, decelerates by rotating and synchronizes with running material. While the cutting knife or other tool rotates with full synchronization in progress, working is done and accelerates, decelerates and proceeds to its home position.
NUSCO-300 series
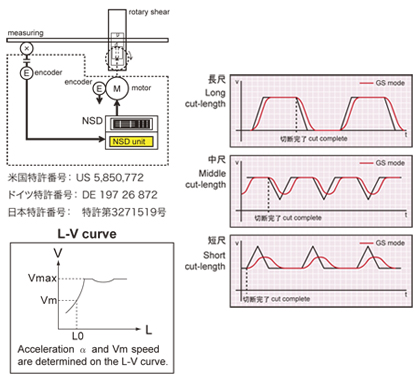
GS - Mode
Problems :
It will seen that the NC on-the-fl y rotary shear represents a
harsh environment for the machine in that the acceleration
and the deceleration is severe. As a consequence, an
increased magnitude of mechanical impacts is applied,
and a repeated application of such impact has a signifi cant
infl uence upon the useful life of the machine.
Oscillations caused by the impact may become external
disturbances which frequently causes a variation in the
cut length or degrade the quality of cut end. In addition, a
difficulty may be experienced in achieving an alignment
between the cutting edges or the useful life of the cutting
edges may be reduced.
Solution :
An acceleration is established in the design which satisfy the
L-V curve, provided as the machine specification required.
However, during an actual operation, the line speed V is not
always equal to Vmax or Vm but is lower than these values in
almost all cases. "G-mode" fi nds a extra setting time and shift
it to positioning control to realize smooth acceleration and
reduced Vm.